Personalized gait generation for control of lower limb assistive devices
Vision: Tuning assistive devices to every single user is a laborious task, particularly because condensing idiosyncrasies of a person into a few variable is not straightforward. Specific traits of a person are a result of their developmental history, the environment they live in, and habits acquired over time. This is where data-driven methods can help. While characteristics of person may be hard to quantify explicitly, extracting them from the samples of their behaviour is possible. And we utilize this to create an automated process for personalizing assistive devices.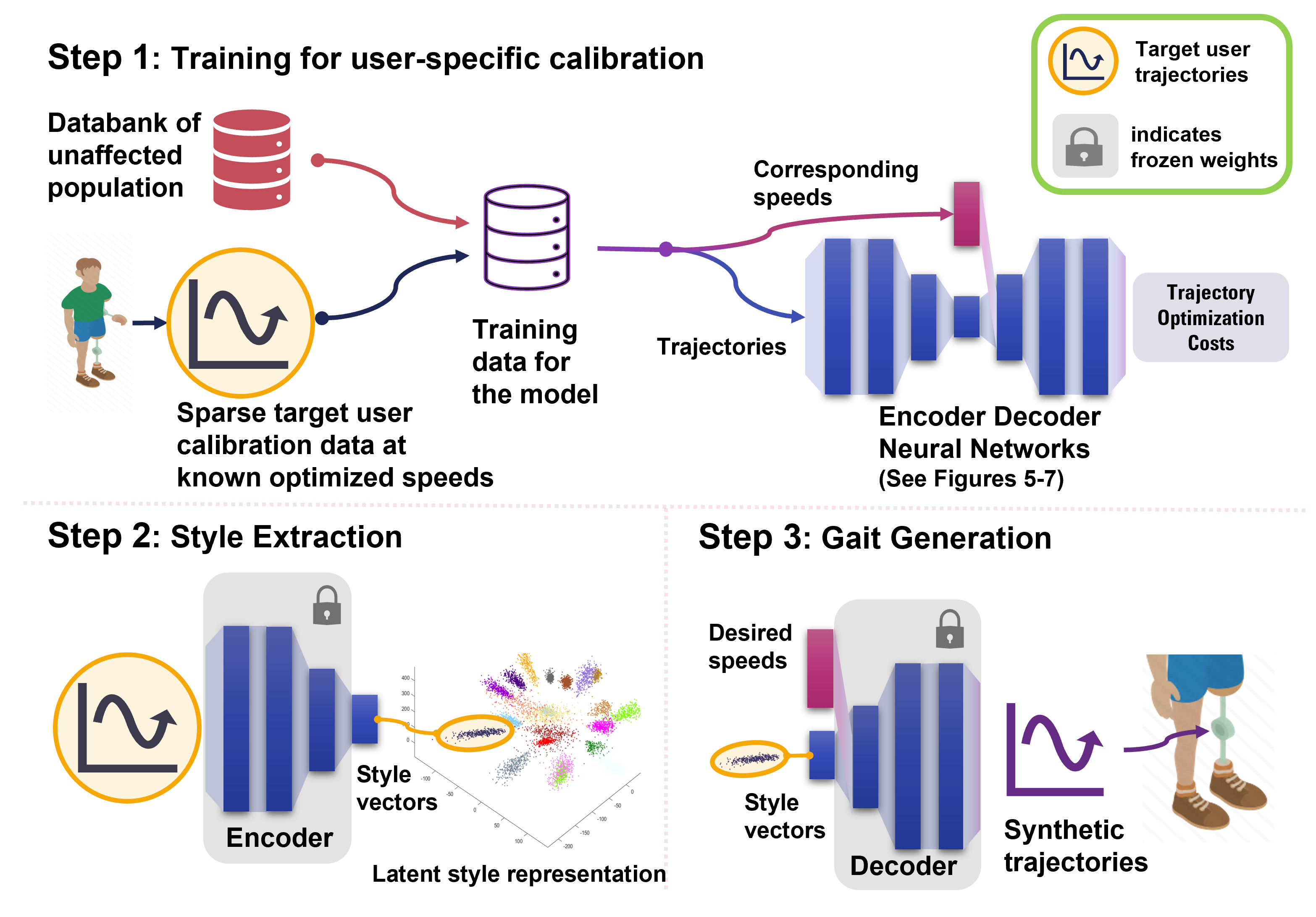
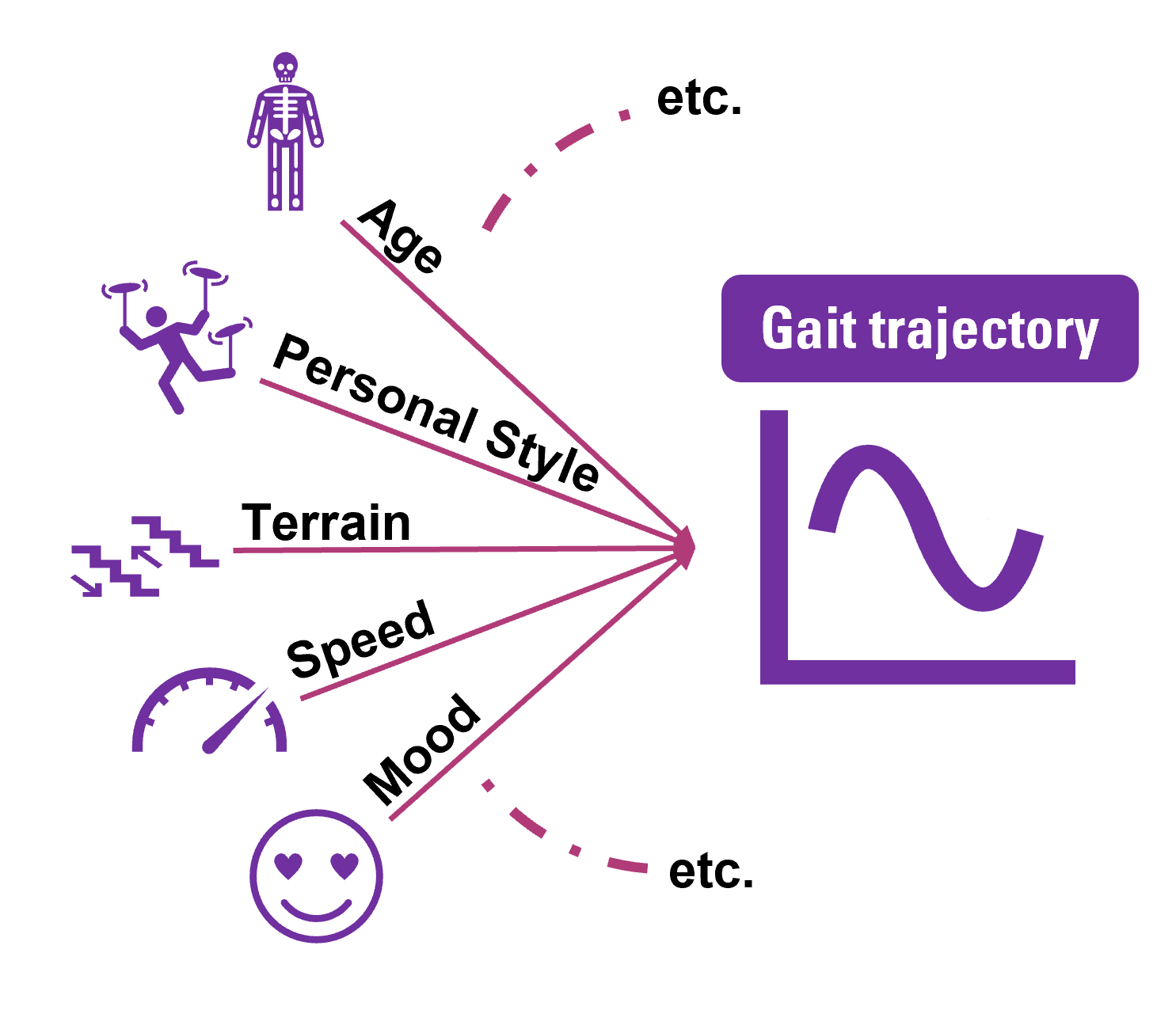
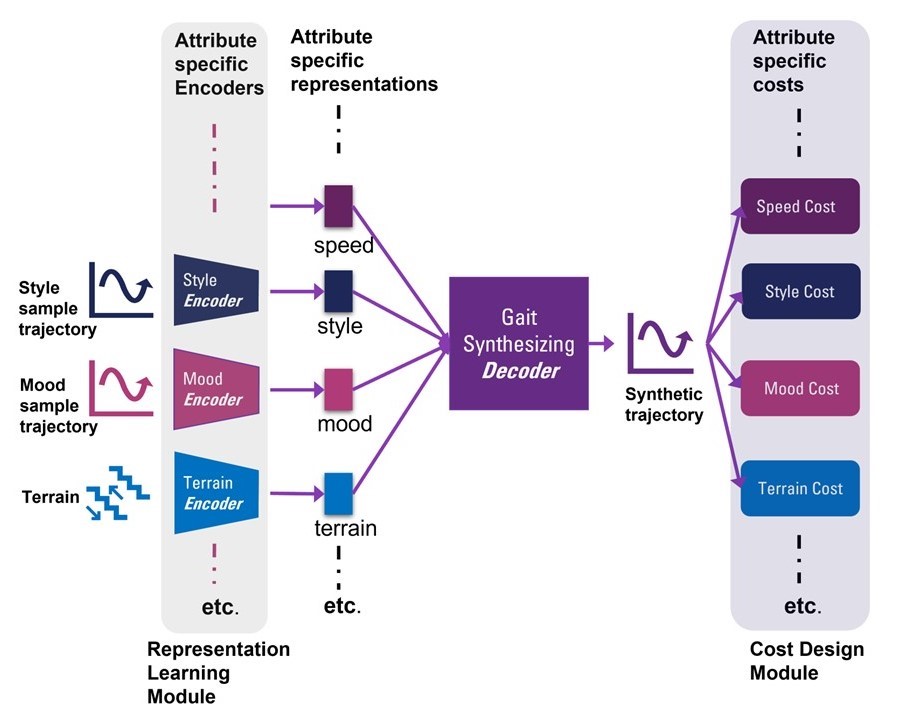
Rich variations in gait are generated according to several attributes of the individual and environment, such as age, athleticism, terrain, speed, personal ”style”, mood, etc. The effects of these attributes can be hard to quantify explicitly, but relatively straightforward to sample. We seek to generate gait that expresses these attributes, creating synthetic gait samples that exemplify a custom mix of attributes. This is difficult to perform manually, and generally restricted to simple, human-interpretable and handcrafted rules. In this manuscript, we present neural network architectures to learn representations of hard to quantify attributes from data, and generate gait trajectories by composing multiple desirable attributes. We demonstrate this method for the two most commonly desired attribute classes: individual style and walking speed. We show that two methods, cost function design and latent space regularization, can be used individually or combined. We also show two uses of machine learning classifiers that recognize individuals and speeds. Firstly, they can be used as quantitative measures of success; if a synthetic gait fools a classifier, then it is considered to be a good example of that class. Secondly, we show that classifiers can be used in the latent space regularizations and cost functions to improve training beyond a typical squared-error cost.
A general architecture for generation of complex gait patterns with desired attributes